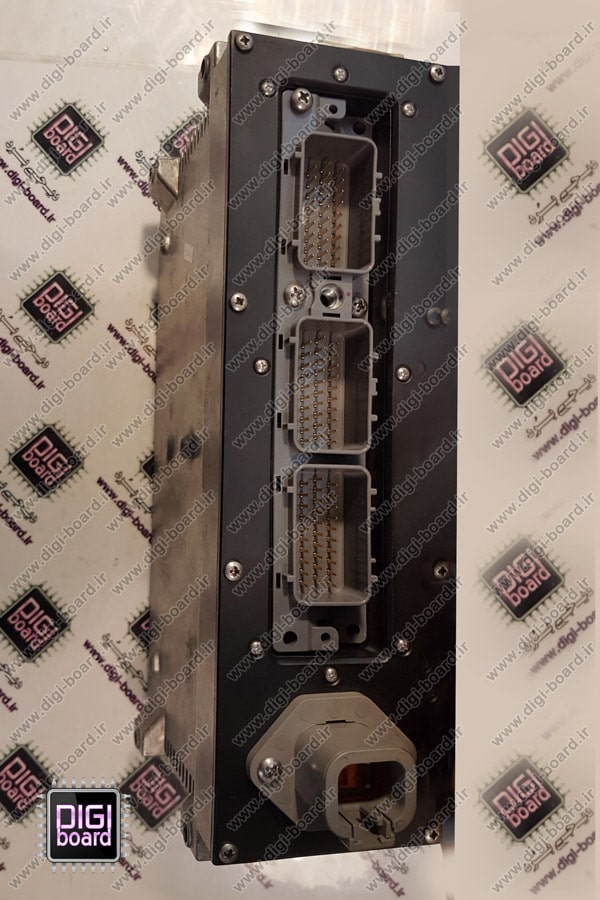
جرثقیلهای مستقر روی سکوهای نفت و گاز دریایی، از مهمترین تجهیزات حمل و نقل بارهای سنگین در فرآیند استخراج و انتقال منابع محسوب میشوند. این جرثقیلها، بهویژه مدلهای PELLEGRINI، به دلیل استفاده در شرایط سخت محیطی و فشارهای کاری بالا، نیازمند سیستمهای کنترل الکترونیکی دقیق و پایدار هستند. کنترلرهای الکترونیکی این جرثقیلها به مرور زمان یا در اثر عوامل محیطی دچار خرابی شده و نیازمند عیبیابی و تعمیر تخصصی میشوند. در این بخش، مشکلات رایج کنترلر جرثقیل PELLEGRINI و روند تعمیر آنها به طور کامل شرح داده میشود.
مشکلات رایج کنترلر جرثقیل PELLEGRINI و روند تعمیر
1. دستگاه کنترلر روشن نمیشود
علت احتمالی:
نوسانات برق ورودی یا آسیب به منبع تغذیه
خرابی فیوزهای حفاظتی و قطعات تغذیه اولیه
سوختگی مدارهای پاور برد کنترلر
اختلال در اتصالات اصلی ورودی تغذیه
روند تعمیر:
بررسی ولتاژ ورودی و سلامت منبع تغذیه
تعویض فیوز یا دیودهای حفاظتی آسیبدیده
تست پاور ماژول و تعویض قطعات معیوب روی برد
بازبینی و ترمیم کانکتورهای ورودی تغذیه
2. عدم پاسخدهی به دستورات اپراتور
علت احتمالی:
خرابی در مدارات میکروکنترلر اصلی
آسیب به شبکههای ارتباطی CAN Bus
اختلال در ورودیهای سیگنال از سنسورها و تجهیزات جانبی
خرابی ماژولهای ورودی/خروجی (I/O Modules)
روند تعمیر:
بررسی و تست سیگنالهای ورودی/خروجی با ابزار تخصصی
تعویض یا برنامهریزی مجدد میکروکنترلرهای پردازش مرکزی
بررسی کامل خطوط ارتباطی CAN و رفع خطاهای شبکه
تعویض ماژولهای I/O معیوب و تست سیستم پس از تعمیر
3. خطاهای ناشی از شوکهای الکتریکی (مانند صاعقه)
علت احتمالی:
نفوذ جریان بیش از حد به سیستم کنترلی
سوختگی کامل برد کنترل یا بخشی از اجزای حساس (CPU، RAM، Flash)
آسیب به شبکههای ارتباطی و ماژولهای واسط
روند تعمیر:
ایزولهسازی مدارهای آسیبدیده
جایگزینی بردهای اصلی یا تعمیر قطعات قابل احیا
تست سلامت پردازندهها و حافظهها با تسترهای پیشرفته
نصب سیستمهای حفاظتی ارتقا یافته برای جلوگیری از تکرار آسیب
4. عدم ارتباط بین کنترلر و دیگر بخشهای جرثقیل
علت احتمالی:
اختلال در پروتکل ارتباطی CAN BUS
قطع ارتباط کابلهای شبکه داخلی
خرابی ماژولهای رابط ارتباطی
مشکلات در تنظیمات نرمافزار کنترلی یا Firmware
روند تعمیر:
بررسی اتصالات شبکه داخلی و سلامت کابلها
تست و عیبیابی کامل شبکه CAN با ابزار CAN Analyzer
تعویض ماژولهای معیوب و تنظیم مجدد شناسههای واحدها
بهروزرسانی Firmware و رفع باگهای نرمافزاری در سیستم پردازشی
5. عدم دقت در عملکرد سیستم هیدرولیک و پنوماتیک
علت احتمالی:
خرابی سنسورهای موقعیت و فشار
ضعف در سیگنالهای کنترلی خروجی به شیرهای برقی
اختلال در ماژولهای کنترل سرعت و جهت موتورهای هیدرولیک
کالیبراسیون نادرست پارامترهای عملکردی در کنترلر
روند تعمیر:
تست سنسورهای فشار، دما و موقعیت و تعویض در صورت خرابی
بررسی خروجیهای PWM و سیگنالهای کنترلی به درایورهای هیدرولیک
کالیبراسیون مجدد کنترلر با نرمافزار تخصصی COBO
انجام تستهای عملیاتی جهت اطمینان از صحت عملکرد سیستمهای محرک
روند کلی تعمیر کنترلر جرثقیل PELLEGRINI
بازرسی اولیه و بررسی ظاهری کنترلر
کنترلر باز شده و علائم ظاهری آسیبهای فیزیکی، نشتی، سوختگی یا خوردگی قطعات شناسایی میشود.
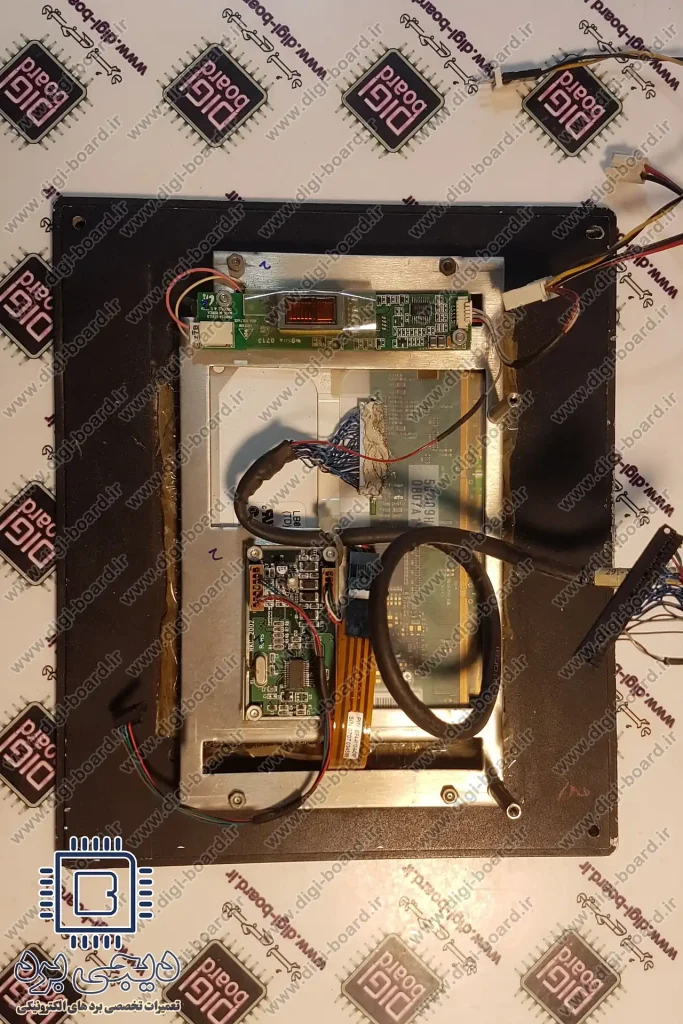
عیبیابی دقیق مدارهای الکترونیکی
با تجهیزات دقیق مانند مولتیمتر صنعتی، اسیلوسکوپ و تستر شبکه CAN، تمامی مسیرهای ارتباطی، تغذیه و سیگنالهای داخلی بررسی میشود.
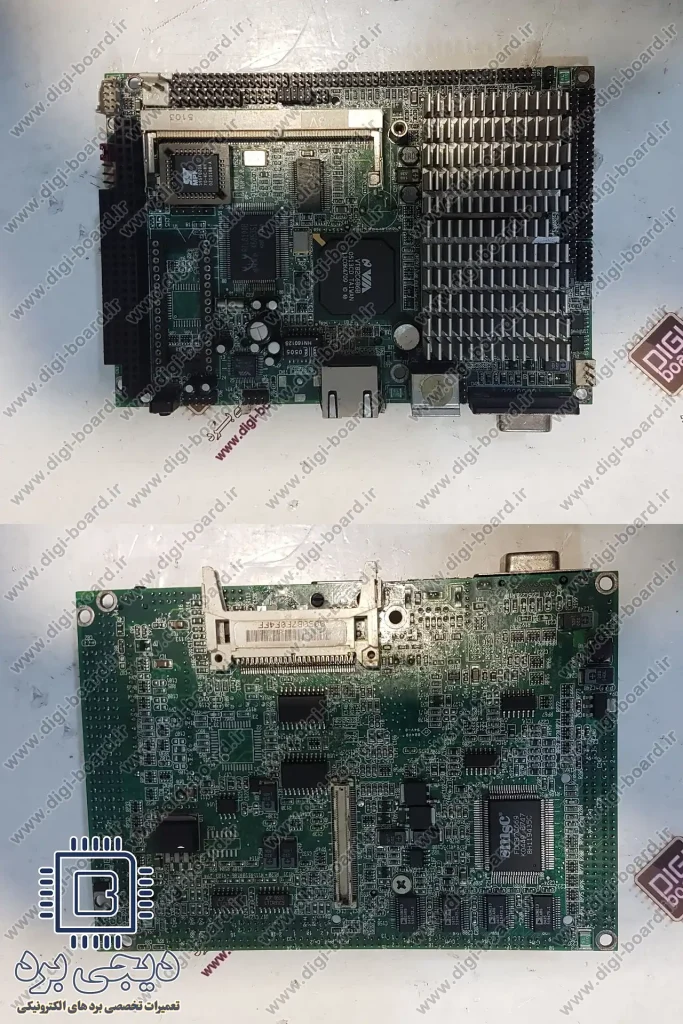
تعمیر و تعویض قطعات معیوب
قطعات حساس شامل میکروکنترلرها، آیسیهای پردازش، ماژولهای CAN، حافظهها و قطعات تغذیه تعمیر یا تعویض میشوند.
برنامهریزی مجدد نرمافزار و Firmware
نرمافزار اصلی کنترلر COBO بر پایه زبان C بازنویسی یا بهروزرسانی شده و پارامترهای کنترلی مطابق با مشخصات دستگاه تنظیم میگردد.
کالیبراسیون نهایی و تست عملیاتی
پس از تعمیر، کنترلر در شرایط شبیهسازی شده و سپس در محیط واقعی سکوی نفت و گاز نصب و عملکرد آن آزمایش میشود.
نکات مهم برای افزایش عمر کنترلر جرثقیل PELLEGRINI
استفاده از سیستمهای حفاظتی مناسب در برابر صاعقه و نوسانات برق
بازبینی و سرویس دورهای شبکههای ارتباطی و کابلکشی داخلی
بهروزرسانی مستمر نرمافزار و Firmware به نسخههای ایمنتر
اجرای کالیبراسیون دقیق سیستمهای هیدرولیک و پنوماتیک
نگهداری سیستم در محیط خشک و کنترل دما جهت کاهش احتمال آسیب به بردها
PLC یا کنترلگر منطقی برنامه پذیر، یک کامپیوتر دیجیتال است که برای خودکارسازی فرآیندهای مختلف الکترو-مغناطیسی در کارخانه ها استفاده می شود.
سیستم پی ال سی دارای خطوط ورودی می باشد. سنسورهایی به این ورودی ها وصل میشوند تا اتفاقات در حال جریان را(مانند دما بالا/زیر مقداری مشخص یا سطح مورد انتظار مایع در تانکر) به PLC اطلاع دهند.همچنین این دستگاه دارای خروجی هایی است که عملگرهایی به آنها وصل شده اند تا نسبت به ورودی ها واکنش نشان دهند.(مانند روشن کردن یک موتور، باز و بسته کردن یک شیر و...)
MRI(مخفف کلمه Magnetic resonance imaging: تصویرسازی تشدید مغناطیسی)، یک فناوری تصویربرداری پزشکی است که از تابش های الکترومغناطیسی برای تولید عکس برداری به منظور تشخیص بیماری استفاده می کند. MRI ابتدا NMR خوانده می شد که به معنای تصویرسازی تشدید مغناطیسی هسته ای(Nuclear) بود و کم کم جای خود را به MRI داد. دلیل این تعویض نام این بود که مردم فکر می کردند که این اشعه ها، هسته ای و رادیواکتیو هستند و سرطان زا می باشند!























{kind=link}
{kind=link}
{kind=link}
{kind=link}